A tavaszi félév összefoglaló posztjában már előrevetítettünk egy "Google robotautós" fejlesztést, most - az őszi szemeszter indulásakor - a tartalmi témajavaslatot adjuk meg: ez a Robot Car World Championship avagy a Robotautó Világbajnokság.
A nyárra azzal tettük le a lantot, hogy "kell egy vízió" és megjelöltük ezt az irányt is, mint olyat, amelyben a robotautós hírek stimulálják a fantáziánkat, mint például akkor, illetve azóta:
Mi a vízió?
A városi közlekedésben két szereplővel számolunk, csupán két szereplőt vizionálunk a jövőre: a gyalogost (aki tipikusan ember, akár biciklis) és a járművet (ami viszont kizárólag kompjuter vezérlésű eszköz, azaz robot). A tipikus gyalogosok természetes intelligenciák, a járműveket egy program vezérli. Ez a program intuitíven a "Google robotautók vezérlő programja".
Robot Car World Championship
A Robotautó Világbajnokság teljesen egyszerűen az a verseny, amelyben a vízióbeli vezérlő programok versenyeznek.
Minden versenynek egy város ad otthont, az első ilyen verseny időpontja és helye:
Robot Car World Championship in Debrecen
2014. december 18., Debrecen.
A verseny két részből áll. 1) Az elsőben a szervezők jellemzik az adott várost, hogy milyen a gyalogos, személy-, tehergépjármű vagy tömegközlekedés (konkrétan például mi a gyalogosok utazási céljainak területi eloszlása az idő függvényében). Ezek az adatok részben helyismeret alapján becsültek, részben pedig direktben a versenyhez elkészített "városmodell"-hez mértek. 2) A második rész maga a verseny, amelynek során a versenyzők jármű vezérlő algoritmusai mérik össze az erejüket.
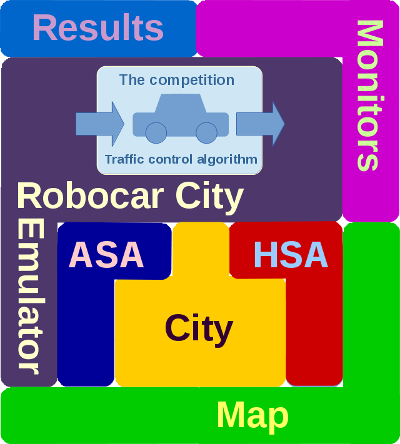
A verseny lelke a Future Vision of Robocar City Emulator program, amely bemenete az adott versenyt lebonyolító város térképe, a várost jellemző részben becsült, más részben megfigyelt adatok és természetesen magát a versengés tárgyát adó jármű-vezérlő programok. A program kimenete például a várakozási és utazási idők átlaga, illetve szórása.
Hol itt a "világ"? Egyrészt siker esetén nemzetközi lehet a részvétel, másrészt - ugyancsak sikeresség esetén - bármely város megrendezheti a saját versenyét, mondjuk például a Robot Car World Championship in Detroit-ot, hiszen ez a kutatás open source alapú.

Iskolai vetület
Ez a javaslatom a FIRST 6.3-as munkacsoportunk decemberig tervezett kutatómunkájára, illetve a jelen kurzus második védésének is ebben a témában (vagy egy céges feladatban) kell kimerülnie. Ennek megfelelően a részletes kutatási tervet, a választható részfeladatokat (tipikusan a fejlesztendő sw-eket) azok pontozását, tehát a részleteket a Debreceni Egyetem Programozói Évkönyvében találják meg az érdeklődők.