

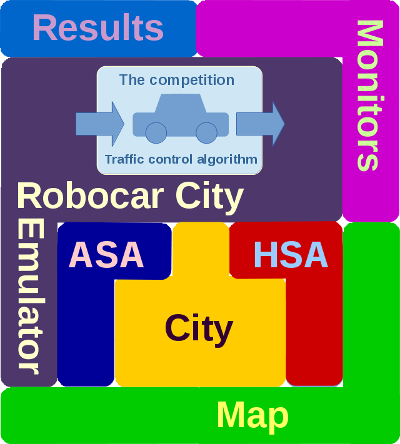
A projektben fejlesztendő sw-komponensek legtöbbje kapcsolatba kerül a térképpel (Map), most konkrétan az OpenStreetMap-el. A közlekedést mindig egy adott városban (City) vizsgáljuk, amelyről a priori bírunk információkkal, illetve automatikusan (ASA) vagy emberi beavatkozással segítve (HSA) gyűjtünk adatokat. Előbbire példa, amikor egy bekötőút bejövő forgalmát egy kamera alapú alkalmazás számolja adott időszakban, utóbbira, amikor ugyanezt egy emberi megfigyelő teszi. Az emulátor (Robocar City Emulator) a járművek mozgatását emulálja a vizsgált városban, miközben minden járművet ugyanazzal a vezérlő algoritmussal (The competition) látunk el. Egy-egy leemulált nap eredményei (Results) alapján hirdetjük ki a versengő vezérlő algoritmusok között a győztest. A versengés alapja például a járművek átlagos utazási idejének, azok szórásának a minimalizálása. Az emulációk mindenféle izgalmas környezetben lesznek megjeleníthetők (Monitors) például a Google Maps vagy OpenStreetMap alapú megjelenítőkben.




